

Recently, deep learning is being
applied to numerous areas and it shows amazing performance especially in the
computer vision area. Computer vision is an area that interprets the vision
information and utilizes it by computers. You can do image classification,
object detection, optical character recognition, and many other fascinating
computer vision tasks using deep learning.
In this post, let's take a look at the
Convolutional Neural Network (so-called CNN) which is used for
deep learning computer vision tasks.

Let's say there is handwritten image data representing "2".
This data is saved in the computer as a 2-dimensional array like below.
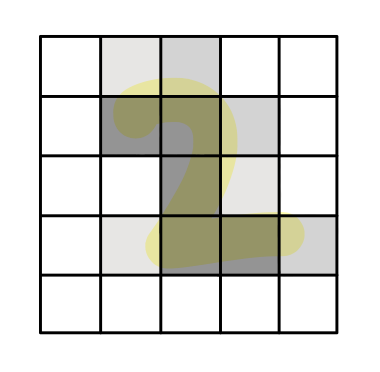
When you say 10-megapixel resolution about your cell phone camera, it means
there are 10 million cells in a 2-dimensional array on the picture taken by
that camera (with maximum resolution setting.) Each cell is called "pixel". So
our example data is composed of 25 pixels (5 X 5).
Each pixel has a value that represents the brightness of its location.
In the case of black and white image data, 0 means black and 1 means
white.
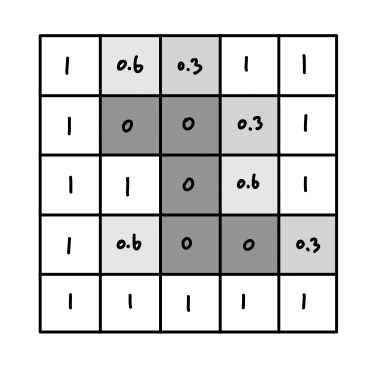
By this logic, the data of "2" is a 2-dimensional array that has 25 values of
brightness. To make it simple, I compose it with only four values - 0, 0.3,
0.6, 1.
Now let's add some transformations here.
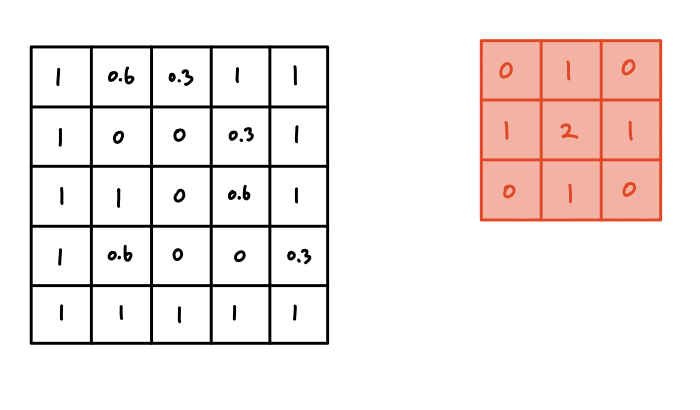
Transformation is simple.
The filter slides on the data, multiplying the values on the same pixel. You can understand this as a weighted sum operation - summing data
values after multiplying each value's weight.

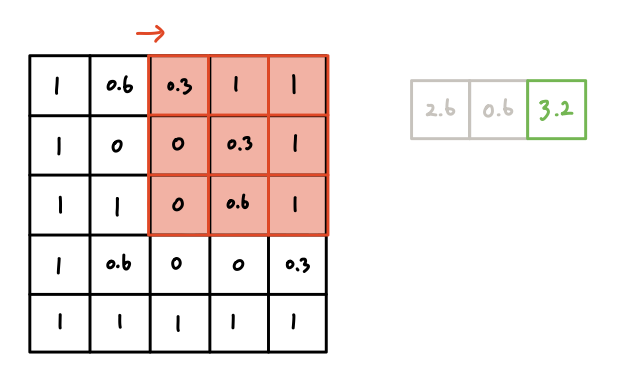
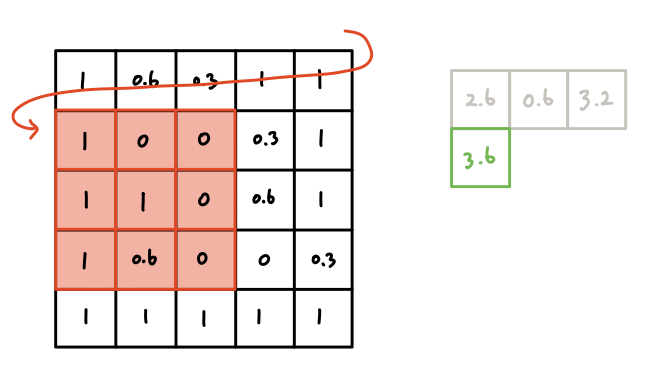
The result of the operation in the first slide is as above.
Let's go line by line.
1. Multiplying the first row of the data [1, 0.6, 0.3]
and the first row of the filter [0, 1, 0]
results in
[0, 0.6, 0] (1 x 0 = 0, 0.6 x 1 = 0.6, 0.3 x 0 = 0)
2. Multiplying the second row of the data [1, 0, 0]
and the second row of the filter [1, 2, 1]
results in [1, 0, 0]
3. Multiplying the third row of the data [1, 1, 0]
and the first row of the filter [0, 1, 0]
results in [0, 1, 0]
4. Summing all of those values gives 2.6. This is the result of this operation.

The next operation starts after the filter slides one cell.
The values in the filter are fixed, and they will be multiplied by the values
in the same pixels of the data. Then, we save this second result next to the
previous result.
And so on.
Now the filter reached the right end of the data. What can we do?
It goes one cell down and starts from the left again.
When you finish this process until the end of the data, you will get the 3 X 3
size result.

Why 3 X 3?
Let's think about the width only. The length of the data is 5 and the length
of the filter is 3. So filter does the operation 3 times.* Same as height, so
the number of operations becomes 3 X 3, 9.
* If filter slides 2 cells each time, then filter locates only two times.
So the size of the result will be 2 X 2, 4. This parameter determines
how many cells the filter slides each time is called stride. If you
want to make the size of the result the same as the original data, then you
can surround the data with zeros before starting the sliding operations.
Then the size of the data will be 7 X 7, and the size of the result will be
5 X 5. This trick is called (zero) padding.
This sliding operation is called convolution.*
* This does not have the exact same meaning of
convolution in
mathematics, but we use it this way in the deep learning field.

Now let's do the same process using another filter. Since the filter has
different values this time, the result will be different.

We can keep doing this by using various filters. We will have multiple result
arrays of the convolution operations. So what's the meaning of doing this?
The first cell in a result array comes from multiplying the left-top 3 X 3
part of the data and the filter. This means a filter summarized 3 X 3
cells into 1 cell by the convolution operation.
In other words, the result arrays are the extracted features from the
original image data. If you use 5 filters, then you will get 5 new features
from the data. Now we get the familiar structure - Neural Networks.





Result array from a convolution operation using a filter is called a feature map. The number of feature maps is called the number of channels as
well. If you use 10 filters, then there will be 10 output channels.
Having multiple channels means that there are multiple 2-dimensional arrays,
which is identical to having one 3-dimensional array. We used single channel
(black and white) data, but the colored image data has 3 channels - Red,
Green, Blue channels.
So what kind of values should be in the filters?
Before the era of deep learning, the values in the filter were fixed. Have
you ever used "sharpen filter" in a photo editor? The red filter we used
earlier is actually almost the same as the sharpen filter. (Try converting 1s
to -1)
However, the values are not fixed when it comes to deep learning.
The key principle of "learning" is changing the values of the weights into
certain directions so that the model makes better predictions.
The values in a convolution filter are the weights of a Convolutional
Neural Network.
That means, we put some random values into the filters and set how many
filters we use in each layer before starting training, but the values in the
filters change as the training goes on. By doing so, the values in the
filters are getting optimized, more meaningful feature maps are being
extracted, so the model makes better predictions.
See, Convolutional Neural Network is also just a Neural Network.
Reference for going deeper
- Image Kernels Explained Visually
- 3D Visualization of CNN
- Stanford CS231n [lecture] [note]

![[책&강의] 직접 보고 추천하는 머신러닝 & 딥러닝 & 수학 총정리 (2022)](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEg4J7BS4klgeMe-qrWTi8NgyI_4TLzPs_ltwFp4591fHoi8fOXITF_0JXLzcFeN9zIMaFPfpO-PpPOl6gej6pA4uRAWBhKMna9DJsNtTW2IbnIn3a2z_xa54Oyn8evu1P0GKQpElxZgMTI/w680/ml%25EC%25B4%259D%25EC%25A0%2595%25EB%25A6%25AC.jpg)
![[비전공자를 위한 딥러닝] 2.4 신경망 (2) - 가중치 행렬 한방에 이해하기](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEiYj8FRyvmF70qt64R3suVR6lJdNynz2-tF5fa7T_3wE8SK3KIO1BCvwyypr5J_mlxaYkQjadrofLYsMjBbgRklxDORXoWiJdWP79otQowzIXsghxuZS9aYLhvvlMNX3NzQ3VYDdslwmbk/w680/%25E1%2584%2587%25E1%2585%25B5%25E1%2584%258C%25E1%2585%25A5%25E1%2586%25AB%25E1%2584%2580%25E1%2585%25A9%25E1%2586%25BC%25E1%2584%2583%25E1%2585%25B5%25E1%2586%25B8%25E1%2584%2585%25E1%2585%25A5%25E1%2584%2582%25E1%2585%25B5%25E1%2586%25BC2+%25281%2529+%25E1%2584%2587%25E1%2585%25A9%25E1%2586%25A8%25E1%2584%2589%25E1%2585%25A1%25E1%2584%2587%25E1%2585%25A9%25E1%2586%25AB+3.jpg)
![[꿀팁] M1 맥북 캡스락/커맨드키 한영전환 딜레이/에러 완벽해결 (부팅 에러나는 karabiner 없이)](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEiuErCCNiCMKeemRrnSwMB_8gGjyJs-AbEfFDDA5joDoDVKNiNgnxEUd2XMmegPyZC5dGU4XAj_Zv8gQwF_MwhuLlQNPNQyga8x7zcs3_RrfPP-nIT4kWmO8kUd9MiiFBoEvxlM_S5GgAA/w680/KakaoTalk_Photo_2021-01-17-05-12-09.jpg)
![[QnA] 네이버 부스트캠프 AI Tech 취뽀했습니다 질문 받습니다](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEgJdAPI1j2bMdLAz3p-qJ3TSGqsjQte_vo8jtMXIaB1Sf1IKaFG_w4SiHE5LT0kxc7-lgVQt7QB6O7NDDQZGBKXrw3SsKje4g6j2BFLLmT0ZX0nuJ40HWCDR_c3I-9M6rcN1eduvYP-lt4/w680/a.jpg)
![[비전공자를 위한 딥러닝] 2.2 선형회귀 (2) - 오차와 비용](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEjEhHlP2edVHNaiochUISyW2RIQ_K5Kdsh0gjT5Wt1vY4nH7uP_0mTNZ1suzBRmpsPOptT1n4-hJ1mOXUhY4ZvLyiywxqn_7wusQDpllIS94VPVuYbQqpCdyuhISZ2mYNQF6laTKDUk_ts/w680/%25E1%2584%2587%25E1%2585%25B5%25E1%2584%258C%25E1%2585%25A5%25E1%2586%25AB%25E1%2584%2580%25E1%2585%25A9%25E1%2586%25BC%25E1%2584%2583%25E1%2585%25B5%25E1%2586%25B8%25E1%2584%2585%25E1%2585%25A5%25E1%2584%2582%25E1%2585%25B5%25E1%2586%25BC2.jpg)

0 댓글